Time-Optimal Planning for Long-Range Quadrotor Flights: An Automatic Optimal Synthesis Approach UTIAS FSC 3:01 5 months ago 54 Далее Скачать
Time-Optimal Planning for Quadrotor Waypoint Flight (Science Robotics 2021) UZH Robotics and Perception Group 2:26 3 years ago 61 287 Далее Скачать
Time-Optimal Online Replanning for Agile Quadrotor Flight (RAL 2022) UZH Robotics and Perception Group 2:48 2 years ago 6 190 Далее Скачать
CPC: Complementary Progress Constraints for Time-Optimal Quadrotor Trajectories UZH Robotics and Perception Group 14:08 4 years ago 5 189 Далее Скачать
Minimum-Time Quadrotor Waypoint Flight in Cluttered Environments (RAL 2022) UZH Robotics and Perception Group 2:17 2 years ago 4 457 Далее Скачать
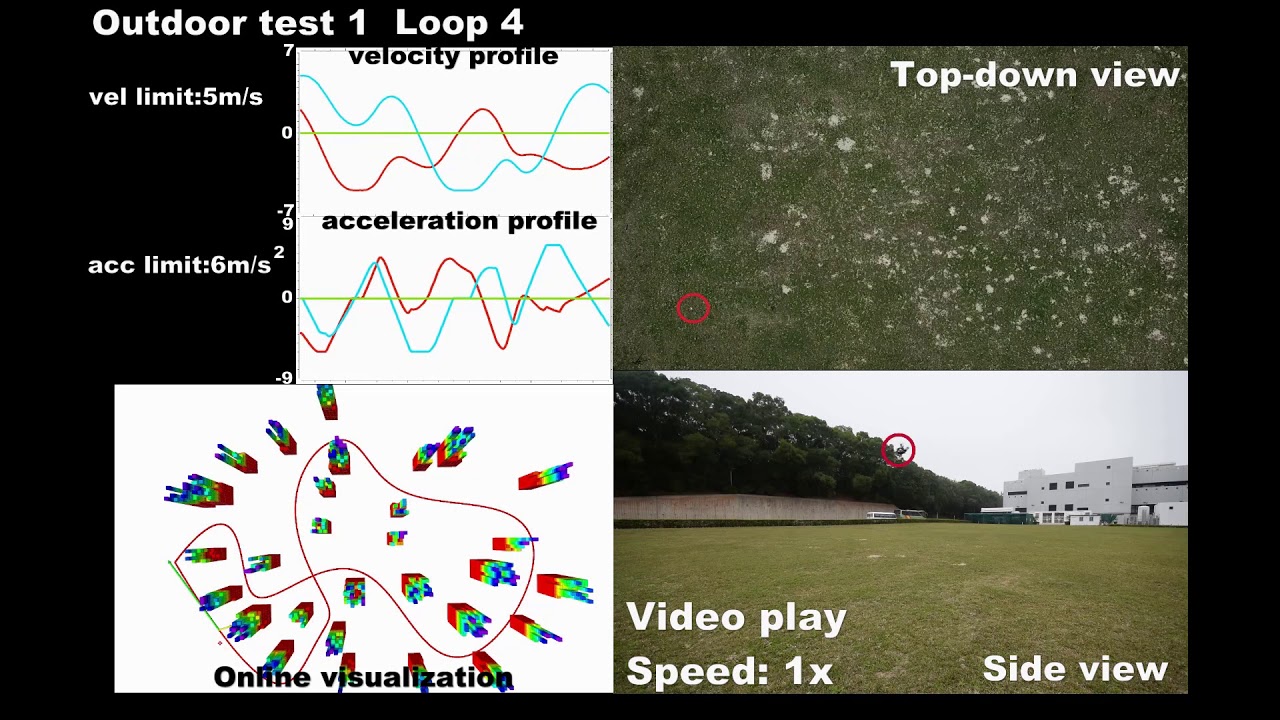
Optimal time allocation for quadrotor trajectory generation HKUST Aerial Robotics Group 3:26 6 years ago 319 Далее Скачать
Optimal trajectory generation for quadrotor teach-and-repeat HKUST Aerial Robotics Group 2:59 5 years ago 701 Далее Скачать
New Algorithm Flies Drones Faster than Human Racing Pilots Rajamanickam Antonimuthu 3:28 3 years ago 852 Далее Скачать
Quadcopter Long Flight Time | TEN TIPS TO FLY FPV LONGER Joshua Bardwell 18:44 5 years ago 109 518 Далее Скачать
How is this possible?! | FPV Drone Freestyle Drone Racing League 0:13 2 years ago 21 519 064 Далее Скачать
Optimal Time Allocation for Quadrotor Trajectory Generation Fei Gao 3:26 6 years ago 498 Далее Скачать
End-to-end Neural Network Based Optimal Quadcopter Control MAVLab TU Delft 1:18 1 year ago 800 Далее Скачать
When Does Adding A Bigger Battery Reduce Flight Time For FPV? - FPV Questions Joshua Bardwell Livestream Clips 3:13 2 years ago 12 192 Далее Скачать
55 minutes flight time with ultralight quad(F2203.5 1500KV) T-MOTOR FPV 6:37 3 years ago 31 732 Далее Скачать
A NOOB's Guide to Long Range FPV With Your Drone! // PropabilityFPV PropabilityFPV 14:00 2 years ago 7 545 Далее Скачать
10” Long Range Fpv Drone #drone #longrangefpv #fpv Drone Camps Show 0:19 1 year ago 80 504 Далее Скачать